

Hello & Welcome to ERAU's Course WorK
Teaching fundamentals and principles of musculoskeletal anatomy; kinematics and kinetics related to human movement; biodynamic analysis of forces in human function and movement as well as estimation of energy and power requirements in human activity; introduction to the mechanical properties of muscle and tendon, and quantitative analysis of the musculoskeletal system; as well as an overview of various biomechanical data collection and analysis through hands-on experience
GOALS:
To introduce students to concepts of mechanics as they apply to human movement, particularly those pertaining to exercise, sport, and physical activity. The student should gain an understanding of the mechanical and anatomical principles that govern human motion and develop the ability to link the structure of the human body with its function from a mechanical perspective. At the completion of this course it is desired that each student be able to: 1) describe motion with precise, well-defined mechanical and anatomical terminology; 2) understand and quantify linear and angular characteristics of motion; 3) understand and quantify the cause and effect relationship between force and linear and angular motion.
Get in Touch with Professor Walck

ME 444 - Biomechanics
Ascend Knee Joint Orthosis Project
Project Objective - Levering the protocol used in “Biomechanical Response of the Knee Complex to a Non-Linear Spring-Loaded Knee Joint Orthosis,” collect kinematic and kinetic data of a deep squat for two trials:
1) Without the knee joint orthosis
2) With the knee joint orthosis
Analyze and evaluate ground reaction forces (GRFs), joint angles, moments, generalized forces, and contact forces of the hip, knee, and ankle. Compare VICON’s results to the ones found by Opensim using OpenSim GAIT 2392 Model.
Provide the following comparative graphs:
- GRFs include 3D, COP, and moments for both feet.
- Joint angles
- Joint moments
- Generalized Forces/Contact forces
ME 444 - Biomechanics
Musculoskeletal Model and Simulation of Golf Swing
Project Objective -
Part 1 -
Build a driver that integrates into the existing Opensim’s Full-Body Musculoskeletal Model of the Lumbar Spine. Create a marker set that allows for an analysis of the lower lumbar to be completed.
Part 2 -
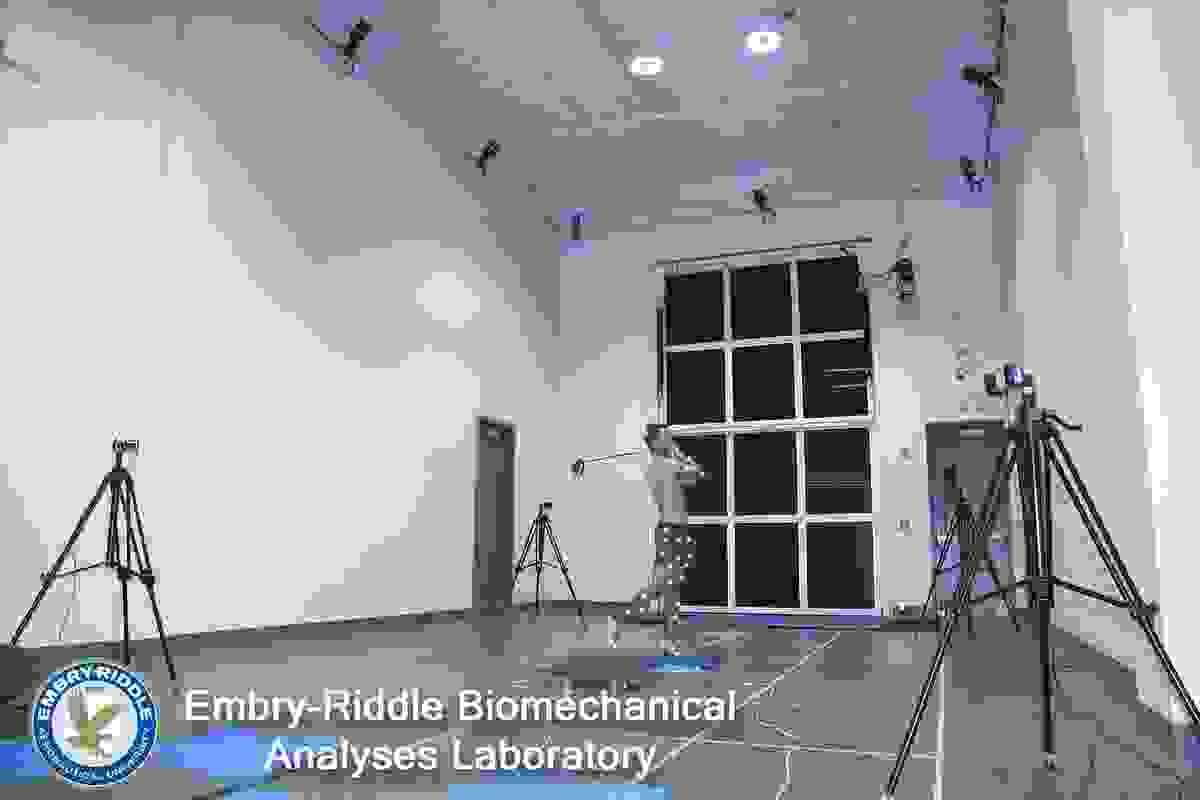
Use kinematic and kinetic data, collected in ERBAL, to run a motion file.
Graph GRFs, joint angles, generalized muscle forces and contact forces of the lumbar spine. Compare these graphs produced in VICON/Nexus
Gallery
Photos & videos from our travels.
















